CPDLC (Controller Pilot Datalink Communications)
CPDLC, doğrudan bir kontrolör ile uçuş ekibi arasındaki veri mesaj alışverişini destekleyen bir veri bağlantısı (data link) uygulamasıdır. CPDLC bağlantısının amacı, bir uçak ve bir ATSU (Air Traffic Service Unit) arasında (yalnızca etkin bağlantı) CPDLC mesajlarının alışverişine izin vermek ve bir sonraki ATSU ile önceden bağlantı kurmaktır (etkin olmayan bağlantı). Aynı anda yalnızca bir tane CPDLC bağlantısı etkin olabilir.
CPDLC nasıl çalışır?
Aktif bir CPDLC bağlantısı, ATSU’ya ve uçaklara CPDLC mesajları gönderilmesine izin verir. Uçağın aktif CPDLC bağlantısına sahip olduğu ATSU, Geçerli Veri Yetkisi – Current Data Authority (CDA) olarak adlandırılır.
CPDLC mesaj öğeleri;
A) Uplinks (uçağa gönderilen mesaj öğeleri) veya,
B) Downlinks (uçaklar tarafından gönderilen mesaj öğeleri)
Her bir uçuş ekibi üyesi (PF veya PM), herhangi bir kleransa yanıt vermeden önce ve/veya uygulamadan önce her bir CPDLC uplink mesajını tek tek gözden geçirmeli ve iletimden önce her bir CPDLC downlink mesajını tek tek gözden geçirmelidir. Bir acil durum esnasında, uçuş mürettebatı normal olarak sesli mesajlaşmaya dönecekti. Bununla birlikte, uçuş ekibi acil durum iletişimleri için daha uygunsa veya sesli iletişim kurulamıyorsa CPDLC’yi kullanabilir. Normal koşullar altında, mevcut ve sonraki ATSU, CPDLC ve ADS-C servislerini otomatik olarak aktarır. Transfer, uçuş ekibi için kesintisizdir. Uçuş ekibinin bir oturum açmayı (logon olmak) yeniden başlatması gerekmez. CPDLC ve Okyanus Geçiş Kleransları iletişimin tamamen farklı safhalarıdır. Uçuş ekibi, CPDLC bağlantısı için herhangi bir istasyona giriş yapmaksızın da (logon olmaksızın) Okyanus Geçiş Kleransı alabilir.
“BY-AT” CPDLC mesajına nasıl cevap vereceksiniz?
Uçuş mürettebatı, amaçlanan anlamı ve uçak sistemleri tarafından sağlanan otomasyon özelliklerini göz önünde bulundurarak “AT” veya “BY” içeren koşullu müsaadelere (kleranslara) doğru şekilde cevap vermelidir.
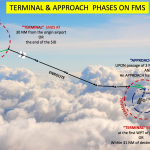
“At time ….. CLIMB TO (Level/Seviye)”, belirlenen seviyeye tırmanışın, belirtilen zamanda başlaması ve belirtilen seviyeye gelindiğinde muhafaza edilmesi talimatıdır.
“CLIMB TO REACH (level/seviye) BY”, belirlenen seviyeye tırmanışın, belirtilen pozisyona gelmeden önce veya en geç belirtilen pozisyonda ulaşılacağını bildiren talimattır.
ADS (Automatic Dependant Surveillance) – Otomatik Bağımlı Gözetim
ADS-B nasıl çalışır?
ADS-B, Transponder Mod-S’nin bir uygulamasıdır. Dolayısıyla, bu uygulama transponder tarafından barındırılmaktadır (hosted). ADS-C istek üzerine (bir sözleşme yoluyla) rapor verirken, ADS-B yayın (broadcasting) yoluyla verileri bildirir. Yayınlanan verileri toplamak/almak için yalnızca bir Mod-S alıcısı gerekir. Herhangi bir veri bağlantısı (data link) gerektirmez. VHF kapsama alanında olduğunda, ADS-B, ADS-B alıcısı bulunan ATC merkezleri veya hava aracı ile bağlantı kurar. ADS-B otomatiktir, çünkü herhangi bir harici uyarıcı gerekmez; Üçüncü taraflara gözetim bilgileri sağlamak için yerleşik sistemlere (on-board) dayandığı için ise bağımlıdır. Son olarak, veriler yayınlanır, kaynağın kimlerin veri aldığına dair hiçbir bilgisi yoktur ve sorgu ya da iki yönlü sözleşme yoktur.
ADS-B dinlemek için ekipmana sahip olanlara (ADS-B OUT) uçak pozisyonunu yayınlar. Bunlar, esas olarak, her saniyede uçak hızı ve yüksekliği ile birlikte yayınlanan pozisyon raporlarını alan ATC yer istasyonlarıdır. ADS-B sinyali, gözlem amacıyla yerde (ADS-B OUT) veya diğer uçaklarda (ADS-B IN) yakalanabilir (captured). SSR’den farklı olarak ADS-B, düşük irtifalarda ve yerde de çalışır. Buna ek olarak, Mod S vericisi bulunan herhangi bir araç, vericinin alıcı aralığında olması koşuluyla, bir Mod S alıcıyla donatılmış herhangi bir araç tarafından “görülebilir”.
ADS-B’nin avantajları, kurulum için (SSR) radardan daha basit ve daha ucuz olması ve ATC kontrol cihazlarının trafik görüntüleme ve performansını genel olarak (SSR) radardan geliştirilmiş olmasıdır. Çoğu durumda ADS-B yer ekipmanı mevcut altyapıya kurulabilir ve sınırlı kaynakları olan ülkelerdeki kurulum maliyetlerini en aza indirir.
Dezavantajı, ADS-B’nin tüm uçakların uygun teçhizatına bağlı olmasıdır. Sistemde ADS-B yeteneğine sahip olmayan birkaç uçak bulundurmak sistemin bu trafikleri görememesine sebep olur ve ATC’yi trafiği kontrol etmek için önceki araçlara güvenmeye zorlar. ATC, ADS-B donanımlı uçaklar için öncelikli kullanım ve kısayollar önerebilir. Diğer dezavantaj ADS-B’nin transponder antenini kullanması, menzilinin yaklaşık 120 NM ile sınırlı olmasıdır. ADS-B alıcısı bulunan herhangi bir ünite (örneğin ATC merkezi, uçak) yayınlanan verileri alabilir.
ADS-C ise, ATSU’ya mevcut uçuş planını güncellemek, uygunluğu kontrol etmek ve acil durum uyarısı sağlamak için uçuş ekibi aksiyonu olmaksızın uçaktan pozisyon raporları almasını sağlar.
ADS-C nasıl çalışır?
ADS-C, uçak gözleminde ve rota uygunluğunun izlenmesi için bir ATSU veya AOC yer tesis sistemine gönderilebilecek uçak konumu, yükseklik, hız, niyet ve meteorolojik verileri otomatik olarak sağlamak için uçaklarda çeşitli sistemleri kullanmaktadır.
Uçuş mürettebatı, uçaklarla olan herhangi bir ADS-C bağlantısını iptal edecek olan ADS-C’yi kapatabilir. ADS-C devre dışı iken, yer sistemi bir ADS-C bağlantısı kuramaz. Normal olarak, uçuş ekibi tüm uçuş için ADS-C’yi armed durumunda bırakmalıdır. Bununla birlikte, ADS-C servislerinin bulunduğu hava sahasında, uçuş ekibi herhangi bir sebepten dolayı ADS-C’yi kapattığında ya da ADS-C servisinin kaybına yol açan aviyonik arıza indikasyonunu alırsa, uçuş ekibi ATC’ye bilgi vermelidir. ADS-C mevcut değilse, uçuş ekibi sesli veya CPDLC ile konum bildirme yapmalıdır. Pozisyon raporlaması için CPDLC’yi kullanırken, uçuş ekibi sadece zorunlu raporlama noktalarında pozisyon raporları göndermeli ve ATC tarafından aksi belirtilmedikçe, pozisyon ve sonraki konum bilgisinin zorunlu raporlama noktalarına uygulanmasını sağlamalıdır. Bir oturum açma (logon) isteği aldıktan sonra ATSU herhangi bir ADS-C raporu alabilmek için uçaklarla ADS sözleşmelerini tesis etmelidir. Uçak sistemi ADS-C’nin seçilmemesi koşuluyla, yer sistemi, uçuş ekibi hareketi olmadan ADS sözleşmeleri oluşturabilir. Uçuş mürettebatı ADS-C kapalı seçerek tüm sözleşmeleri iptal etme hakkına sahiptir ve bazı uçak sistemleri, uçuş ekibinin belirli bir ATSU ile bir ADS sözleşmesini iptal etmesine izin verir.
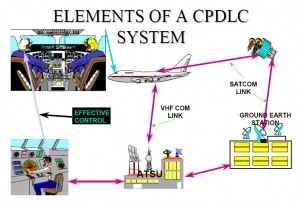
ATC sistemi uçak raporu bilgileri ile ya talep üzerine, periyodik ya da olay sözleşmesiyle bir “sözleşme” (ADS-C’deki C) kurar. ADS-C, CPDLC ile ilişkili bir gözetleme teknolojisine sahiptir. Bilgiler, uçakların FMS’lerinden uydu yoluyla bir yer istasyonuna, bir hizmet sağlayıcı (service provider) aracılığıyla da ATC’ye iletilir.
Periyodik Sözleşme (Periodic Contract)
Periyodik bir sözleşme, ATSU’nun aşağıdakileri belirtmesini sağlar:
Uçak sisteminin ADS-C raporu gönderdiği zaman aralığı; ve
Periyodik raporda yer alacak olan isteğe bağlı ADS-C grupları. Her isteğe bağlı grup, isteğe bağlı grubun periyodik rapora ne sıklıkla dahil edildiğini belirten benzersiz bir modüle sahip olabilir (örneğin, ve bir modül, isteğe bağlı grubun gönderilen her periyodik rapora dahil edileceğini belirtir). Düzenli bir sözleşme, iptal edilene veya değiştirilene kadar geçerlidir. Bir ATSU yeni bir periyodik sözleşme oluşturduğunda, uçak sistemi, otomatik olarak önceki periyodik sözleşmeyi yenisiyle değiştirir.
Talep Sözleşmesi (Demand Contract)
Bir talep sözleşmesi, ATSU’ya tek bir ADS-C periyodik rapor talep etmesini sağlar. Bir talep sözleşmesi uçaklarla yürürlükte olan diğer ADS sözleşmelerini iptal etmez veya değiştirmez.
Olay/Durum Sözleşmesi (Event Contract)
Bir olay sözleşmesi, belirli bir olay meydana geldiğinde ATSU’nun bir ADS-C raporu talep etmesini sağlar. Bir ATSU, herhangi bir zamanda bir uçakla yalnızca bir tane sözleşme imzalayabilir. Bununla birlikte, olay sözleşmesi birden çok olay türü içerebilir. Bu isteğe bağlı etkinlikler şunları içerir:
A) Yol Noktası Değişikliği Olayı (WCE); Waypoint Change Event
B) Seviye Aralık Sapma Olayı (LRDE); Level Range Deviation Event
C) Lateral Sapma Olayı (LDE); Lateral Deviation Event ve
D) Dikey Hız Değişikliği Olayı (VRE); Vertical Rate Change Event
Yeni bir ADS-C olay sözleşmesine cevaben, uçak ayrı ayrı bir bildirim gönderir ve daha sonra belirtilen etkinliklerden biri gerçekleştikten sonra bir ADS-C raporu iletilir.
ADS-C ve ADS-B Arasındaki Fark
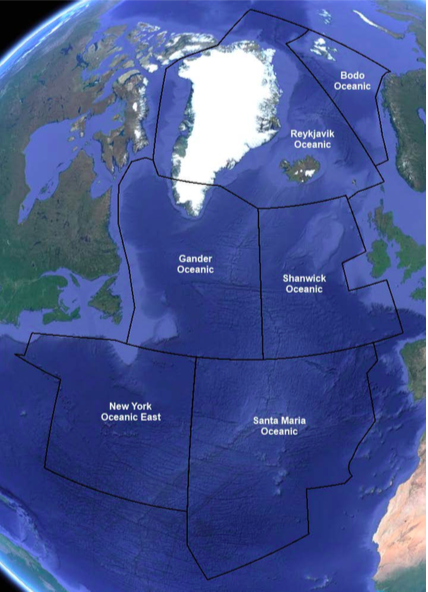
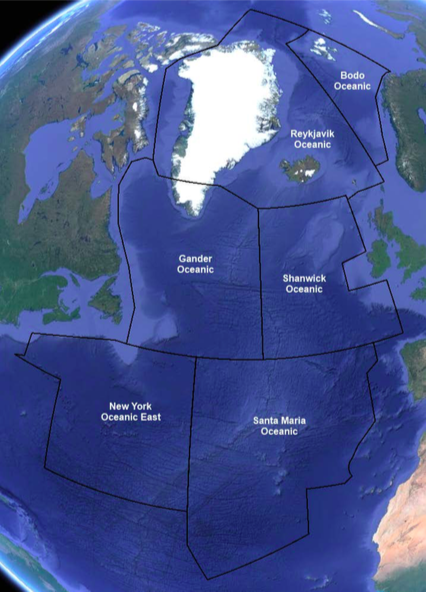
ADS-C ve ADS-B menziller göz önüne alındığında, örneğin, okyanuslar arası bir uçuş sırasında birbirlerini tamamlamaları bekleniyor. Uçak, VHF kapsama alanı dışındayken, ADS-C, uçak ve ATC merkezi arasındaki bağlantıyı yapar. Aksi halde, ADS-B bağlantıyı herhangi bir ATC merkezine veya kapsama alanındaki hava araçları ile yapar
Terimler benzer olmasına rağmen, ADS-C ve ADS-B iki farklı uygulamadır. Karşılaştırıldığında, ADS-B (PSR-SSR veya uçakların tanımlanmasını mümkün kılan herhangi bir yer tabanlı sistem) bir ATS gözetim sistemidir. Bir ADS-B kabiliyetli uçak, ATS gözetim hizmetlerini destekler ve bilgileri nispeten yüksek bir oranda yayınlar ve yerdeki veya alan içindeki başka bir uçaktaki uygun alıcılar bilgi alır.
ADS-C’nin temel avantajı, ADS-B’nin kapsama alanında bulunmayan alanlarda gözetim sağlayabilmesidir. Bu sistem, uçak niyetinin raporlanmasına olanak tanır ve uçak ile ATC yer istasyonu arasında bir veri bağlantısı sağlar.